
推荐新闻
联系方式
全国服务热线:
咨询热线:400 605 0755 传真:0755-28456835 联系人:李升 邮箱: jnhj008@sina.com 地址:深圳市龙岗区平湖街道禾花社区华南大道一号华南 国际印刷纸品包装物流区(一期)P13 栋 109号
焊接机器人机械手的优化
发布时间:2019-06-06 点击量:2704
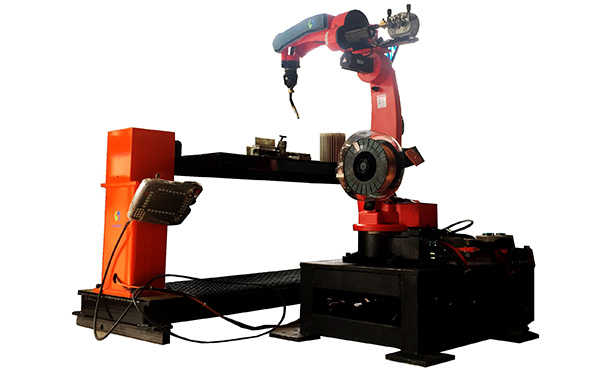
焊接机器人由于机械手中各个轴的动作范围都扩大了不少,因此机械手在提升覆盖范围的同时也扩大的动作范围,使得焊接机器人的操作空间也能更广阔。由于目前大部分的焊接机械手在各关节处都设置了先进的双层密封构造的防水插口,使得手腕部分的防护等级达到很高的等级,如此一来,焊接机械手即便是在恶劣环境也能保持稳定的工作状态。
焊接机器人对焊接机械手进行改进之后,它的手臂更加轻量化了,当然还有所配置的高回转小型马达,这些基础都使得焊接机械手作业速度和加速度得到了大幅度提升;而且通过整合负荷重量,也提升了其加速度性能,有效的缩短了循环时间。
另外,焊接机械手配备的手腕也越来越小巧,使设备可以在更小的空间内运转,通过采用高输出的力矩,从而提升了手腕的负载能力,拓展了抓取工件的形状选择范围。
焊接机器人的操作机构方面的变化,通过有限元分析、模态分析及仿真设计等现金设计方法的运用,逐步实现了机器人操作机构的优化设计。较为明显的就是高强度轻质材料的运用,进一步提高了焊接机器人操作机构的负载和自重比。这些都是焊接机械手身上所发生的变化,经过不断实践和改进之后,除了机械手之外我国的弧焊机器人技术也已经进入到成熟阶段,推出了像无轨道爬行式弧焊机器人这样的新型设备。
上一条:焊接机器人焊接方管要注意的问题 | 下一条:焊接机器人控制系统价值



 400 605 0755
400 605 0755

