
推荐新闻
联系方式
全国服务热线:
咨询热线:400 605 0755 传真:0755-28456835 联系人:李升 邮箱: jnhj008@sina.com 地址:深圳市龙岗区平湖街道禾花社区华南大道一号华南 国际印刷纸品包装物流区(一期)P13 栋 109号
焊接机器人的控制器作用
发布时间:2019-06-06 点击量:4209
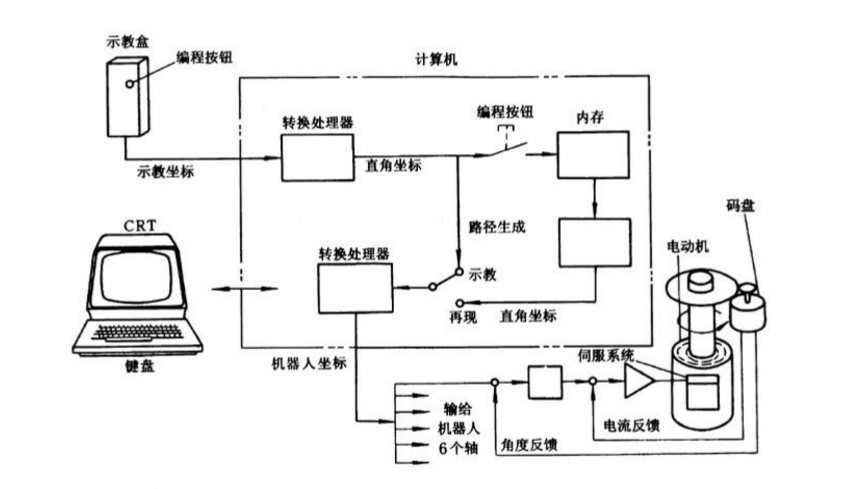
焊接机器人的控制器是机器人的核心部件,它实施焊接机器人的全部信息处理和对机械手的运动控制。工业焊接机器人控制器大多采用二级计算机结构,虚线框内为第一级计算机,它的任务是规划和管理。机器人在示教状态时,接受示教系统送来的各示教点位置和姿态信息、运动参数和工艺参数,并通过计算把各点的示教 (关节) 坐标值转换成直角坐标值,存入计算机内存。
焊接机器人在再现状态时,从内存中逐点取出其位置和姿态坐标值,按一定的时间节拍 (又称采样周期) 对它进行圆弧或直线插补运算,算出各插补点的位置和姿态坐标值,这就是路径规划生成。然后逐点的把各插补点的位置和姿态坐标值转换成关节坐标值,分送至各个关节。这就是第一级计算机的规划全过程。
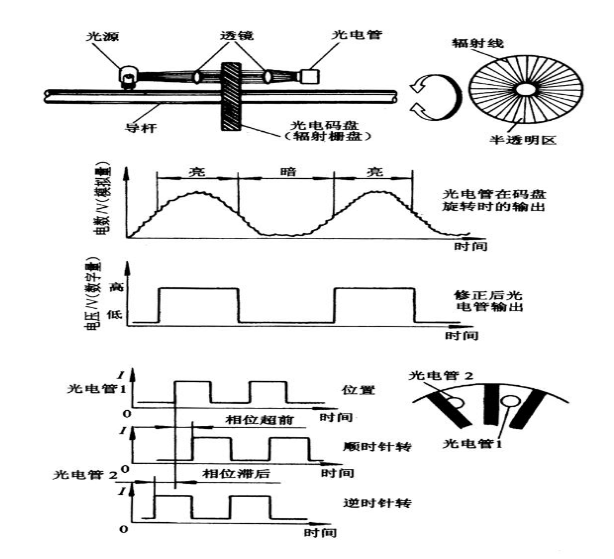
第二级计算机是执行计算机,它的任务是进行伺服电动机闭环控制。它接收了第一级计算机送来的各关节下一步预期达到的位置和姿态后,又做一次均匀细分,以求运动轨迹更为平滑。然后将各关节的下一细步期望值逐点送给驱动电动机,同时检测光电码盘信号,直到其准确到位。
以上均为焊接机器人工作的实时过程,上述大量运算都必须在控制过程中完成。以 PUMA 机器人控制器为例,第一级计算机的采样周期为28ms ,即每28ms向第二级计算机送一次各关节的下一步位置和姿态的关节坐标,第二级计算机又将各关节值等分30细步,每0.875ms向各关节送一次关节坐标值。
焊接机器人在再现状态时,从内存中逐点取出其位置和姿态坐标值,按一定的时间节拍 (又称采样周期) 对它进行圆弧或直线插补运算,算出各插补点的位置和姿态坐标值,这就是路径规划生成。然后逐点的把各插补点的位置和姿态坐标值转换成关节坐标值,分送至各个关节。这就是第一级计算机的规划全过程。
第二级计算机是执行计算机,它的任务是进行伺服电动机闭环控制。它接收了第一级计算机送来的各关节下一步预期达到的位置和姿态后,又做一次均匀细分,以求运动轨迹更为平滑。然后将各关节的下一细步期望值逐点送给驱动电动机,同时检测光电码盘信号,直到其准确到位。
以上均为焊接机器人工作的实时过程,上述大量运算都必须在控制过程中完成。以 PUMA 机器人控制器为例,第一级计算机的采样周期为28ms ,即每28ms向第二级计算机送一次各关节的下一步位置和姿态的关节坐标,第二级计算机又将各关节值等分30细步,每0.875ms向各关节送一次关节坐标值。
上一条:焊接机器人的示教盒作用 | 下一条:焊接机器人使用的编程语言有哪些?



 400 605 0755
400 605 0755

